
Is the teacher really the student? One has to ask that question after listening to Dr. Alain Kornhauser describe his initial skepticism about his students’ desire to compete in the 2005 DARPA Grand Challenge. It wasn’t long before the students had convinced this Princeton Professor to be the advisor in their efforts. One outcome of that effort was to change Kornhauser’s views on the direction of mobility.
A Major Moment in History?
As background, the 2005 DARPA challenge was a successor to the Congressionally-mandated, 2004 DARPA Grand Challenge. The 2004 DARPA Grand Challenge had the following objective:
“to leverage American ingenuity to accelerate the development of autonomous vehicle technologies that can be applied to military requirements.”
No team completed the 2004 Grand Challenge. In 2005, DARPA followed up with a 132-mile race through the desert between Barstow, CA and Primm, NV. The DARPA challenge is one of those events that historians may look back at as a trigger for substantial changes in the way humans live.
And Kornhauser quickly understood that by giving vehicles autonomy, the need for rails and expensive infrastructure are no longer necessary. Silicon and software are the rails and infrastructure of autonomous vehicles. These items scale non-linearly through Moore’s Law and next to zero-cost replication. By adding sensing, intelligence, and control in the vehicle for local decision-making, Kornhauser’s dream of low-cost mobility for all seems within reach.
Coach Kornhauser
As a coach, Kornhauser brought not only an academic perspective but his entrepreneurial experience and vast network of relationships. This was important, given that this was
“entirely an undergraduate student project focused on academics, elegance, simplicity and the minimal use of funds.”
One of the first calls Kornhauser made was to Rick Spina, a former student and GM executive, who was able to reroute a pickup truck destined for salvage to the Prospect11 team at Princeton. Haines Berry Farm was another in-kind sponsor, offering up their narrow dirt roads, berms, and extensive foliage for course testing. Although he doesn’t mention it in the above interview, some of the funding to support the project came from the Kornhauser-Gervasio Graduate Fellowship, which he helped establish in 1995.
As Kornhauser describes above, Prospect 11 was not part of the 40 finalists announced in June 2005. It was close enough, however, that DARPA gave the Princeton team a second chance to qualify as an “Alternate”. In August 2005, Prospect 11 passed this milestone and was accepted to the Grand Challenge in October of that year.
One Line of Code
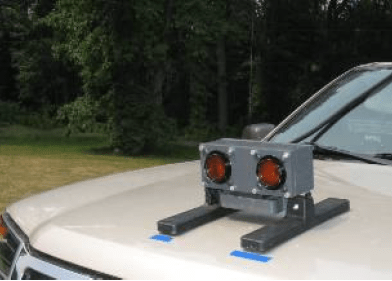
A stereo vision camera, encased in a custom-built enclosure, was the vehicle’s sole sensor. Position data were provided by GPS receivers that had been donated by Trimble and ALK Technologies. Two computers, one based on an Intel Pentium 4 and the other on an AMD Athlon 64 processor, ran all the computations. Given that they only had one forward-looking camera, they stored locations of detected objects; creating a map of sorts which would be necessary if they ever had to back up.
The race came and all was going well until it ended 9.8 miles into the 132-mile journey. As Kornhauser explains, they had to leave Prospect 11 in the desert as they couldn’t afford to bring it home to Princeton at that time. Like MacArthur in World War II, he and the team returned three weeks later and quickly discovered that a single line of code was the difference.
Simply, the code wasn’t performing garbage collection. It continued to store object locations without purging older objects. The buffer filled up at 9.8 miles and the system shutdown. He explains that after they applied this fix, they went on to drive the 2004 course, the 2005 course, and navigate Beer Bottle Pass three times, including twice at night.
The Beginning of a Longer Story

Judging by the pictures and conversations with some of the students who participated in the project, this was not only an intellectually rewarding project, it was fun for all involved. Even the name itself, Prospect 11, was sort of an inside joke having to do with a Princeton college drinking game. As pointed out in this 2005 CNET article, an autonomous vehicle could be helpful for such a game.
In the above interview, Kornhauser voices empathy for his students and their efforts that came up short in terms of finishing the DARPA race. Still, as he repeatedly indicates, that challenge represents just an early marker in a long, arduous path to bringing low-cost, autonomous mobility to the public roads. The process itself and the experience gained were surely more valuable for both students and the teacher than the DARPA prize. It helped build the foundation for impactful careers and current developments in improving mobility for all.
Stay tuned for Part 7 of this interview, where Dr. Kornhauser discusses some of the lessons he learned from his many students over the years.
Click here to view all the segments of this interview.
Leave a Reply